EQ2 digital setting circles
This is a project to make standalone digital setting circles for the RA and DEC axes of an EQ2 GEM or similar mount. The basic approach is to couple a multiplier gearbox to each axis to increase the number of turns that can be detected for each revolution of the axis. Optical sensors are used to count the gearteeth of the final gear of the gearbox as it rotates. Using this method we get to a resolution of 17,818 sensor ticks per revolution. This corresponds to an angular resolution of 1.2 arcminutes per tick. An object like M51, the Whirlpool Galaxy, comes in with an angular size of 11 arcminutes x 7 arcminutes, so in principle there is enough resolution to make this work. Backlash in the geartrain is the limiting factor for accuracy and reproducibility, and software is used to minimise the effects of this.
This is a project to make standalone digital setting circles for the RA and DEC axes of an EQ2 GEM or similar mount. The basic approach is to couple a multiplier gearbox to each axis to increase the number of turns that can be detected for each revolution of the axis. Optical sensors are used to count the gearteeth of the final gear of the gearbox as it rotates. Using this method we get to a resolution of 17,818 sensor ticks per revolution. This corresponds to an angular resolution of 1.2 arcminutes per tick. An object like M51, the Whirlpool Galaxy, comes in with an angular size of 11 arcminutes x 7 arcminutes, so in principle there is enough resolution to make this work. Backlash in the geartrain is the limiting factor for accuracy and reproducibility, and software is used to minimise the effects of this.
The optical sensors for each axis have their own dedicated head-end microprocessor hanging off them to count ticks and changes of direction. ATMega328 8-bit CPUs are used. This is the same processor as used in the Arduino UNO board, and the Arduino development system is used to develop the code and program the CPUs. An Arduino UNO board costs around £20 and the
PC based development environment is a free download (http://arduino.cc/ for more information).
The great plus of the ATM328 cpu is that once programmed, a minimum of support components are needed to incorporate it into
your own circuit – a 16Mhz crystal and two capacitors are all that is required. The ATM328 chips are also cheap – around £3.50 for the bootloader installed version.
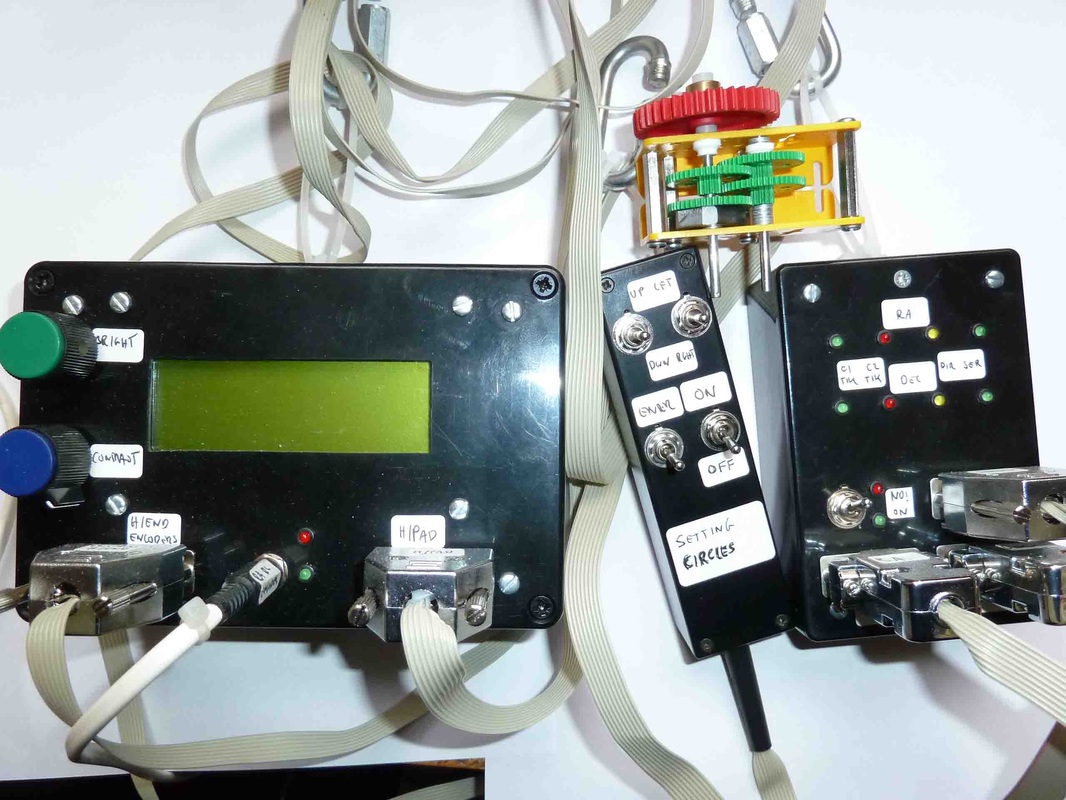
The head-end microprocessors output each sensor tick count over two serial links, the data formatted as a signed 32 bit integer. The serial links connect to a display unit, comprising a third ATM328 CPU which monitors the counts and displays the mount RA and DEC positions on a 4 line, backlit, LCD display. There is also a 5-key remote hand pad for commanding the system.
Mechanical and sensor construction details
Head end electronics and software
Display unit electronics and software
PC based development environment is a free download (http://arduino.cc/ for more information).
The great plus of the ATM328 cpu is that once programmed, a minimum of support components are needed to incorporate it into
your own circuit – a 16Mhz crystal and two capacitors are all that is required. The ATM328 chips are also cheap – around £3.50 for the bootloader installed version.
The head-end microprocessors output each sensor tick count over two serial links, the data formatted as a signed 32 bit integer. The serial links connect to a display unit, comprising a third ATM328 CPU which monitors the counts and displays the mount RA and DEC positions on a 4 line, backlit, LCD display. There is also a 5-key remote hand pad for commanding the system.
Mechanical and sensor construction details
Head end electronics and software
Display unit electronics and software
